Khai thác nghệ thuật hạ cánh trên các bề mặt phức tạp như cành cây gồ ghề của loài chim, các kỹ sư tại Stanford đã phát triển 1 loại robot với nhiều đặc tính như có móng vuốt, đệm ngón chân, bàn chân và cẳng chân uốn cong, cho phép nó hạ cánh trơn tru ở gần như bất cứ đâu. Vẻ ngoài của robot khá "dị" bởi nó là sự kết hợp của drone với 4 cánh quạt ở thân trên và phần thân dưới mang hình dáng của chân 1 chú chim được in 3D.
Trong bước đầu tiên, nhóm nghiên cứu đã tạo ra các nguyên mâu sơ khai nhất dựa trên các nghiên cứu liên quan đến hình thái học của gia cầm nói chung. Họ tham khảo các tài liệu có sẵn và làm việc với xác chim, cố gắng lấy càng nhiều thông tin nhất có thể mà không cần phải sử dụng chim sống.
David Lentink, kỹ sư nghiên cứu cao cấp tham gia vào quá trình phát triển và các cộng sự đã làm đi làm lại phần chân robot để nó có thể bám lên cành cây. Nếu thiết kế không thể bám trên bề mặt, robot sẽ rơi khỏi cành cây và nhóm sẽ điều chỉnh lại các tính năng và thử lại cho đến khi nào ổn thì thôi.
Nhóm nghiên cứu đã thay đổi thiết kế từ 1 chân thành 2 chân khi các thử nghiệm cho thấy việc có 2 chân sẽ giúp robot cân bằng trên các bề mặt không đối xứng. Họ cũng đổi các miếng đệm cao su vốn phẳng lì hồi đầu trên chân robot sang loại gợn sóng và nhám hơn.
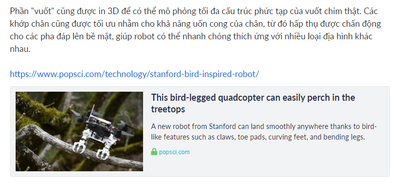
Phần "vuốt" cũng được in 3D để có thể mô phỏng tối đa cấu trúc phức tạp của vuốt chim thật. Các khớp chân cũng được tối ưu nhằm cho khả năng uốn cong của chân, từ đó hấp thụ được chấn động cho các pha đáp lên bề mặt, giúp robot có thể nhanh chóng thích ứng với nhiều loại địa hình khác nhau.
https://www.popsci.com/technology/stanford-bird-inspired-robot/
Trong bước đầu tiên, nhóm nghiên cứu đã tạo ra các nguyên mâu sơ khai nhất dựa trên các nghiên cứu liên quan đến hình thái học của gia cầm nói chung. Họ tham khảo các tài liệu có sẵn và làm việc với xác chim, cố gắng lấy càng nhiều thông tin nhất có thể mà không cần phải sử dụng chim sống.
David Lentink, kỹ sư nghiên cứu cao cấp tham gia vào quá trình phát triển và các cộng sự đã làm đi làm lại phần chân robot để nó có thể bám lên cành cây. Nếu thiết kế không thể bám trên bề mặt, robot sẽ rơi khỏi cành cây và nhóm sẽ điều chỉnh lại các tính năng và thử lại cho đến khi nào ổn thì thôi.
Nhóm nghiên cứu đã thay đổi thiết kế từ 1 chân thành 2 chân khi các thử nghiệm cho thấy việc có 2 chân sẽ giúp robot cân bằng trên các bề mặt không đối xứng. Họ cũng đổi các miếng đệm cao su vốn phẳng lì hồi đầu trên chân robot sang loại gợn sóng và nhám hơn.
Phần "vuốt" cũng được in 3D để có thể mô phỏng tối đa cấu trúc phức tạp của vuốt chim thật. Các khớp chân cũng được tối ưu nhằm cho khả năng uốn cong của chân, từ đó hấp thụ được chấn động cho các pha đáp lên bề mặt, giúp robot có thể nhanh chóng thích ứng với nhiều loại địa hình khác nhau.
https://www.popsci.com/technology/stanford-bird-inspired-robot/